CVPR是一年一度的计算机视觉方面的顶级学术会议,是全球视觉学科的学者展示交流最新科研成果的平台,也是工业界前来了解最新科研动向和招贤纳士的良机。
如果说过去30年里计算机视觉的主流方向是图像处理和3D几何学,那最近的5年则是人工智能技术在视觉领域大放异彩的时期;而融合了3D几何和人工智能两大方向的智能驾驶领域则像是计算机视觉应用的集大成者。于是也不难理解,智能驾驶行业对于本次会议的重视,能够在会议上发表论文也成为智能驾驶公司研究水平的体现。

本届CVPR会议共收到有效投稿3309篇,共接收979篇,论文录取率为29%,魔视智能研究员陈宇及张强弓有2篇论文入选,分别侧重于疲劳驾驶,地图构建以及车辆定位技术,陈宇及张强弓博士在会议现场与国际学者们进行交流沟通,得到学术界的积极反响。
魔视智能专注于组合辅助驾驶,是深度学习和计算机视觉等先进的人工智能技术在汽车智能驾驶系统领域实现嵌入式产品化的领跑者。我们坚持与学界、企业界和行业「共享AI+未来」,已与澳大利亚国立大学、阿德莱德大学、上海科技大学等国内外科研机构建立了长期的深度合作关系,在人工智能技术领域拥有深厚的技术积累。

陈宇博士现场讲解人脸特征点定位
魔视智能入选论文
1. FSRNet : End-to-End Learning Face Super - Resolution with Facial Priors
本文由陈宇博士以第一作者完成,并入选Spotlight文章。
方法:
对于人脸的分析通常依赖于特征点的定位,在传统方法中,当输入图像存在模糊或分辨率较低时,定位效果会急剧下降。FSRNet同时处理人脸超分辨率和先验估计问题,通过一个端对端训练的神经网络,自动从低分辨率人脸自动恢复出高分辨率人脸和准确的特征点位置。
应用:
在车辆驾驶中,对于驾驶员状态的监控和纠正有助于提升驾驶安全,在此过程中人脸特征点的定位是非常重要的一步,而在实际应用中,通过摄像头采集的人脸可能存在图像模糊等问题,此时通过FSRNet依然可以稳定地得到特征点位置,从而进行准确的状态监控。

2. A Fast Resection - Intersection Method for the Known Rotation Problem
本文由张强弓博士以第一作者完成。
方法:一个高效的同时重建三维点云和摄像头位置的算法,Res-Int算法。该算法把一个原本庞大的最优化问题分解成许多非常简单的3元优化子问题,并提出了求解该子问题的高效算法。整个算法除了在性能上远远超越现有算法,还能处理现有方法无法应对的大数据集。由于整个问题被分解成若干独立的子问题,每个子问题可以并发求解,从而达到更高的性能。
应用:该算法在智能驾驶领域中对地图构建,车辆定位等应用有贡献。
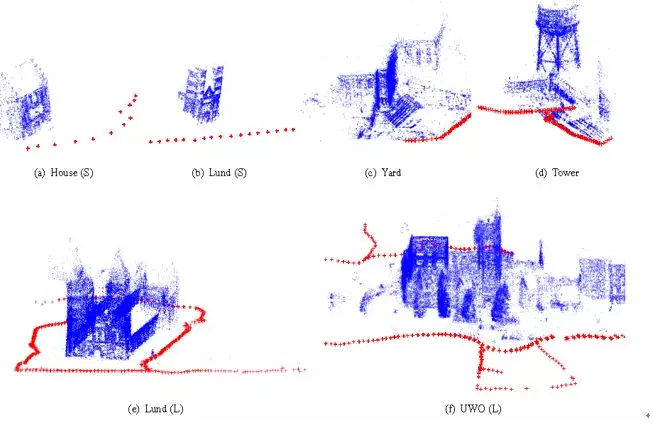
我们的算法在6个不同数据集上的3维重建的结果
最后附上论文链接地址,欢迎在评论区与我们交流。
FSRNet : End-to-End Learning Face Super - Resolution with Facial Priors
http://openaccess.thecvf.com/content_cvpr_2018/html/Chen_FSRNet_End-to-End_Learning_CVPR_2018_paper.html
A Fast Resection - Intersection Method for the Known Rotation Problem
http://openaccess.thecvf.com/content_cvpr_2018/html/Zhang_A_Fast_Resection-Intersection_CVPR_2018_paper.html